Embedded Tips
Updated on 2025-12-28
This page represents some general info, tips and tricks, and other knowledge I have gain over the years specifically in developing embedded system firmware.
By embedded systems I refer to microcontrollers, think Attinys and PICs. I will not be covering any “high level” embedded systems like a Raspberry PI system, as I think of those as closer to a general computer when developing firmware/software.
This page will be very opinionated (it is my site after all). Be warned!
Table of Contents:
- Don’t pre-optimize, but be cautious
- Optionally learn the instruction set
- Fixed Variable Size
- Try to avoid floats if unnecessary, and no FPU
- Looping N times
- Stepping through arrays inside function
- for(Ever) (main loop)
- Modulus of 2^n
- Utilize #define for substitution constants
- Read up on any MCU silicon errata
Don’t pre-optimize, but be cautious
The general programming tip of “Don’t pre-optimize” is also applicable to embedded systems.
If you aren’t familiar, a good practice is when you are developing a piece of software (firmware or PC software), don’t spent a lot of time optimizing code without it being necessary. For example if you are software floating math, don’t try to convert it to fixed point (more on that here) until the math is too slow for your application
BUT, you should try to use good design programming paradigms in your code, which is both good practice and can make your code run better. You should also be somewhat weary of what can be an obvious bottleneck, so that if your firmware needs to be optimized you know what to work on first.
Optionally learn the instruction set
When you are dealing with a new CPU architecture, especially for a larger/professional project, I would have a quick glance at the instruction set.
While for the most part you will let the compiler handle things, and this is not strictly required, you might have a project that directly can be solved by 1 or a couple of instructions.
For example if you are dealing with a ARM Cortex M0 processor, to reverse bits of a word, you can do a C implementation, or you can use the built-in REV instruction.
It will also give you a better idea of what the processor is capable of, and you will be better positioned if you have to optimize things in assembly due to constraints.
Fixed Variable Size
We all know the C types int, byte, etc.
I try not to use the pre-defined C types in my firmware.
I instead use fixed width types like uint8_t, int32_t, etc for the most part.
My reasoning is as follows:
- You cannot trust C type length types across different architectures.
For example, in an STM32 processor
intis 32-bits, while in AVR it is 16-bits. - In some uses of variables, you purposefully want to overflow, like for an 8-bit checksum
- You know the architecture you are working with, so you can easily know to use uint8_t for AVR systems or uint32_t for ARM systems when possible for non-critical variables (like in a for loop)
- It is more readable to know what variable size you are working with explicitly.
- On some architectures,
intisn’t the ideal CPU bit size to allow for a wider programming compatibility (most wouldn’t expect anintfor example to be only 8-bits)
uint8_t vs int in AVR
To see the danger of the last point, the following two assemblies are of these two same function, but one with i set to uint8_t, the other to int. Both are compiled with -Ofast.
void doLoop(char *text, uint8_t n){
for(int i=0;i<n;i++){
doSomething();
}
}
| uint8_t | int |
|
|
Try to avoid floats if unnecessary, and no FPU
Generally, low-end microcontroller doesn’t come with a FPU (floating point unit) with it’s CPU. The FPU is a hardware block that assists in doing floating point (think decimal/fractional numbers) math. Without this FPU, the toolchain will include software floating point, which is painfully slow, at least compared to integer arithmetic.
If you don’t need floating point, I would just avoid them in cases where it’s easy to use decimal arithmetic. With that said, if your application is not bottle necked with software floating point, by all means use those. Remember, don’t pre-optimize until needed.
With that said, if you need to apply fractional math, and software floating point is too slow for your application, you can always use fixed point math. I will leave the Wikipedia article on it if you want to do further reading.
Looping N times
If you have a function that loops around n times which is passed, an initial implementation would be to use the for loop:
void doLoop(char *text, uint8_t n){
for(uint8_t i=0;i<n;i++){
doSomething();
}
}
But I prefer another method: the while loop. We use n as the condition for the while loop while decrementing it per iteration. The while statement loops until the condition is false (which is 0), so it will exit when n=0. The following is a C implementation:
void doLoop(char *text, uint8_t n){
while(n--){
doSomething();
}
}
This method in my opinion is more readable, and should save on instructions as one doesn’t need to create an i variable and keep track of that. Plus CPUs are good as checking if a value is zero, versus having to compare two values then check the result.
Below is the dis-assembly of both functions, compiled with -Ofast optimization for an AVR system, allowing the compiler to go to town.
note: Each code block is scroll-able, you may have to scroll to view more details
| For Loop | While Loop | Do While Loop |
|
|
|
You might notice another method I added: do while. As I was typing this up, I figured I try it out, and it turns out it is more efficient than the while loop. This makes sense thinking about it: the while loop requires an initial check to see if i == 0, versus the do-while which just checks at the end, where it branches off anyways.
It is implemented as follows:
void doLoopDoWhile(char *text, uint8_t n){
do{
doSomething();
}while(--n);
}
I will post an ARM comparison soon (need to document the generated assembly)
If your function used the incrementing variable i, this method is not that applicable.
With that said, if all you are using i for is to step through an array (for example to print text), a better way of doing so can be found in the section below
Stepping through arrays inside function
Let’s say you have an array, like a string, to increment in a function (this can also apply outside of a function, but not as common). Let’s say the function is as follows:
void doLoop(char *text, uint8_t n){
for(int i=0;i<n;i++){
print(text[i]);
}
}
Instead of getting the value of the array at offset i, I prefer think of the array passed as a pointer, which is what it really is.
So I would get the value of the current pointer location through the * operator, then increment the pointer itself.
void doLoop(char *text, uint8_t n){
do{
// *text returns the value at the pointer location,
// and text++ increments the pointer
print(*text++);
}while(--n);
}
This is useful if the contents of text only needs to be used once, otherwise you loose the original pointer location, making this trick a bit mute.
for(Ever) (main loop)
The following is a cool way of defining your main loop.
While it can be used for any while(1) loop, I reserve it only for the main loop.
#define EVER ;;
int main(void){
// init stuff
for(EVER){
// main stuff
}
}
Modulus of 2^n
If you are applying a modulus (%, which is a division remainder operation) of a power of two as the divisor, for example to limit a buffer size, you can instead AND the dividend by 1 minus the divisor, for example:
buff[idx++] = r; // some operation
// the following two are equivalent
idx %= 64;
idx &= 0x3f; // 63
This works because we are dealing with a binary system, a modulus of a power of two inherently limits the number of bits (a modulus of 64 would limit the result to 0 to 63, 0 to 0b111111), which is binary-equivalent of ANDing by the maximum 0b111111, as the rest of the bits will be zero.
If the divisor is part of the design you construct, for example a buffer size you define, I would limit it to power of twos for this reason.
Why do this? Well a modulus, if the compiler did not optimize for it (which it should if the divisor is a constant), will be an expensive division operation. Many low-end processors don’t come with a division instruction, so you are spending time doing software division. Even if the processor comes with hardware division, it may take a couple or more instruction cycles to complete. Compare that to the AND operation, which is common for all processors, and tends to take only a single instruction cycle.
Utilize #define for substitution constants
If you have a constant variable that is used to define a single data type, such as an integer for a IO pin, you are better off using the C pre-processor to substitute in the desired value. An easy example is defining the IO pin number for an Arduino program.
Defining the variable as a const reserves it in flash with all other constants, requires the instruction to fetch the constant value from memory to use it, and depending on the architecture and compiler it will be copied to RAM on startup.
Compare this to a define, where the value it will be merely substitute in-place before the compilation step. This saves a memory allocation when the value can easily by substituted with a single load-immediate instruction, which tends to be cheaper than reading from memory.
Below are an example of both using the pre-processor and using a constant variable.
#define LED_IO 5
const uint8_t led_io = 5;
void setup(){
// both functions to exactly the same thing, but the define saves on a variable.
pinMode(LED_IO, OUTPUT);
pinMode(led_io, OUTPUT);
}
Read up on any MCU silicon errata
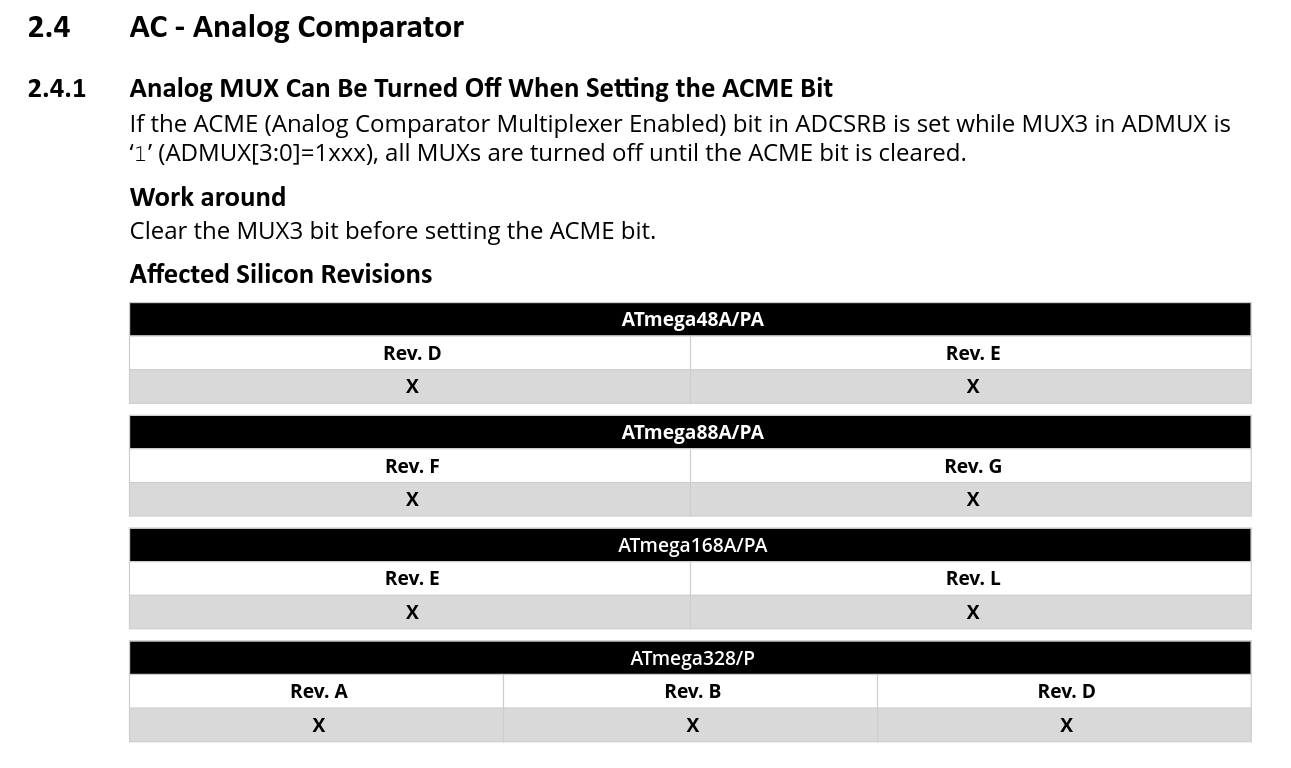
No silicon is perfect, and sometimes hardware bugs exists. These bugs can be a trap will cause many hours of potential painful troubleshooting, especially when you think the firmware should work as expected but it just isn’t. Manufacturers normally would have an errata document per part, which includes the bugs, which silicon version is affected (laser marked with the part package), and any potential work around.
One should always take a look at the errata for the MCU they are using, to preempt any potential issues. Really this should be done in the circuit layout stage, as depending on the severity of the errata it may not function for your desired application.
As an example, looking at the ATMega328P, there is an errata for the analog comparator when a certain bit is set, setting the enable bit will not enable the mux into the comparator. If you were developing a firmware that used the analog comparator, this issue could cause what may appear to be a software bug, while the whole time it is the hardware. All silicon revisions are effected, and the work-around given is to clear that bit before enabling the mux.
This is one niche example, but there are more egregious erratas depending on what MCU you are using. For example the original PIC32MK MC family, not currently in production, [had 4.2 pages worth of errata items!. Any one of them could cause you to have a bad time! For example in that processor, item 27 is simply “Deep Sleep is non functional” with no work around. If you wanted a low power application out of that chip, too bad!